С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ)3×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.

Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
- Изменением напряжения сети. Меняя подводимое питание можно управлять частотой вращения двигателя;
- Добавлением пускового реостата в цепь якоря. Регулируя сопротивление, можно уменьшить скорость вращения;
- Управлением магнитного потока. Двигатели с электромагнитами дают возможность регулировать поток путем изменения тока возбуждения. Однако нижний предел ν min ограничен насыщением магнитной цепи двигателя, что не позволяет увеличивать в большой степени магнитный поток.
К каждому из вариантов соответствует определённая зависимость механических характеристик.
Методы регулирования применительны к двигателям с различными:
- типами возбуждения;
- величиной мощности.
На практике в современных электрических моторах, в связи с недостатками и ограниченности диапазонов, рассмотренные методы не всегда применяются.
Это еще связано с тем, что машины отличаются довольно небольшими КПД, и к тому же не позволяют плавно увеличивать или уменьшать частоту вращения.
Электронные же схемы управления с регуляторами частоты, работающими от аккумуляторной батареи на 12 В, напротив, широко используются. Например, они очень актуальны для управления низковольтными электродвигателями 12 вольт в приборах автоматики, детских игрушках, электрических велосипедах, аккумуляторных детских автомобилях.

Принципиальной особенностью метода является то, что ток в цепи якоря и момент, развиваемый электродвигателем, зависят лишь от величины нагрузки на его валу. Регулировка осуществляется с помощью регулятора оборотов электродвигателя.
В течение очень долгого времени тиристорные преобразователи являлись единственным коммерчески доступными регуляторами двигателей. К слову сказать, они по-прежнему самые распространенные на сегодняшний день. Однако с появлением силовых транзисторов стали наиболее популярными регуляторы оборотов двигателя постоянного тока с широтно-импульсной модуляцией. Приведём для примера ниже схему, работающую от источника постоянного тока 12 В.
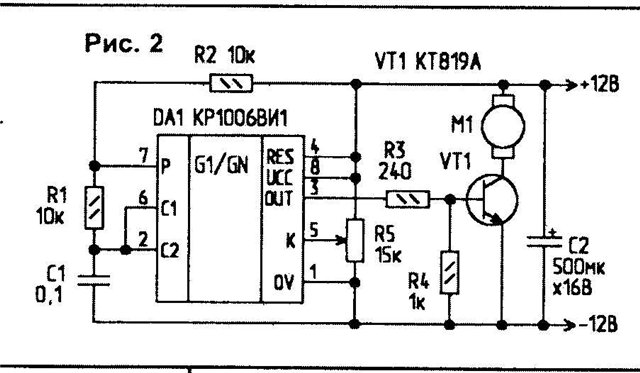
Схема на практике даёт возможность, к примеру, увеличивать либо уменьшать яркость свечения ламп накаливания на 12 вольт.
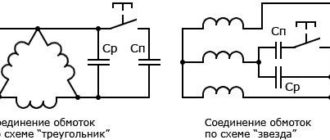
Последовательно-параллельное управление используется в ситуациях, когда два или более агрегата постоянного тока соединены механически. Схема с последовательным соединением электродвигателей, в которой общее напряжение делится на всех, используется для низкоскоростных приложений. Схема с параллельным соединением машин, имеющих одинаковое напряжение, используется в высокоскоростных применениях.
Заключение
Рассмотренный метод регулировки напряжения сети считается самым эффективным и экономичным вариантом, так как:
- им обеспечивается широкий диапазон изменения скоростей (wmin / wmax) и лучшие энергетические характеристики (КПД);
- он работает без каких-либо потерь мощности в силовой цепи якоря.
Управление осуществляется плавно, и по точности регулировка частоты вращения является весьма высокой.